Robot Operating System (ROS) is a common robotic framework or middleware consisting of a set of libraries that help roboticists build robotic applications. ROS provides fundamental interfacing tasks such as interfacing with sensors, debugging, localization etc.
In this seminar, Mohammad Wasil presented an introduction to robotics, sensor representations, ROS and its application on robot vision. This seminar was conducted on October 14 2023 in collaboration with the robotic team of the University of Jember.
See-Think-Act Cycle in Autonomous System
Autonomous systems or robots are machines that have abilities to sense, think and act towards the environment. It’s a continuous cycle in dynamic worlds.

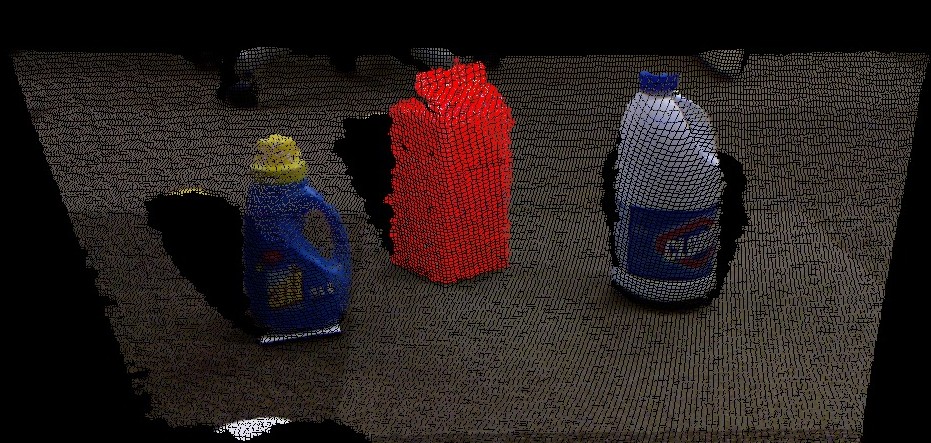
Sensor Representations
Sensors can be represented in 2D data like an image or 3D like point clouds.

Robot Operating System (ROS)
ROS consists of several components, namely ROS master, Node, Message, Topic and Service

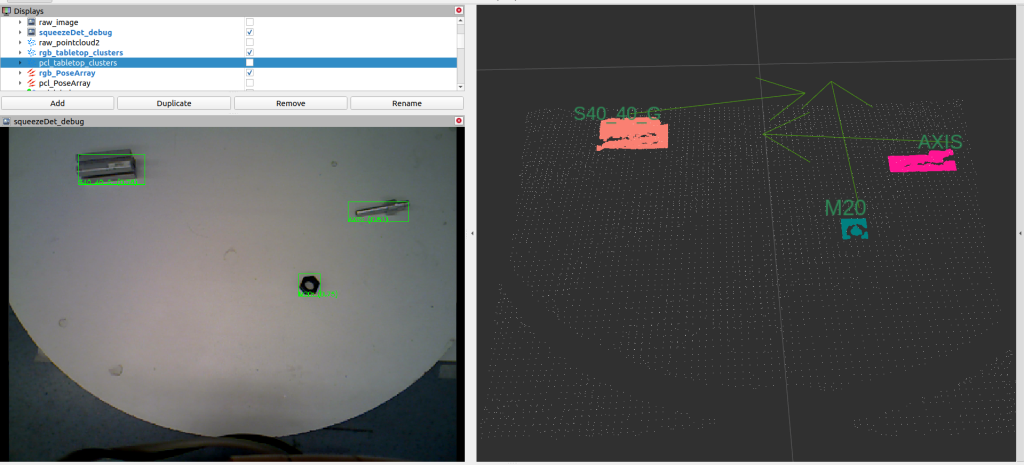
Object Recognition and Pose Estimation
Organizer (in collaboration with Lantip-Litmus)